



Fail operational control algorithms of electrical drives
This software package contains control algorithms for PMS motors extended by algorithms compensating for the effect of powertrain errors, thus of motor, control unit, software, sensors, and power electronic errors.
The prepared software is intended for multiphase electric motors. Especially for a six-phase motor connected as two times three-phase motor. The algorithms can also be easily modified, for example, for use on a three times three-phase motor connection. The control algorithms ensure the operation of the motor in the event of an electrical fault on the stator winding, in the case of sensor’s malfunction due to redundancy concept, and also in the event of a fault in the power stage of the frequency converter. The features of algorithms include bumpless switching between the individual compensation strategies of the motor control to ensure the smooth operation of the motor. In the case of an inter-turn short circuit, the compensation algorithms reduce short-circuit currents by the field weakening of the damaged part of the motor. For this reason, the created SW package is only suitable for motors whose field weakening index is less than one. The goal of the implemented compensation algorithms is also to minimize the influence of the fault on the maximum achievable motor output power. The input to the control algorithm is information about the detected fault, which can either be directly detected by the power stage of the inverter (like desaturation fault flag) or provided by algorithms for fault detection.
The software is created as a set of schemes in the MATLAB/Simulink development environment. Switching between states and initialization of the whole system is ensured by state machines prepared with the help of the StateFlow.
From the source control block schemes, it is possible to generate C / C ++ code suitable for implementation in a microcontroller AURIX 2G.
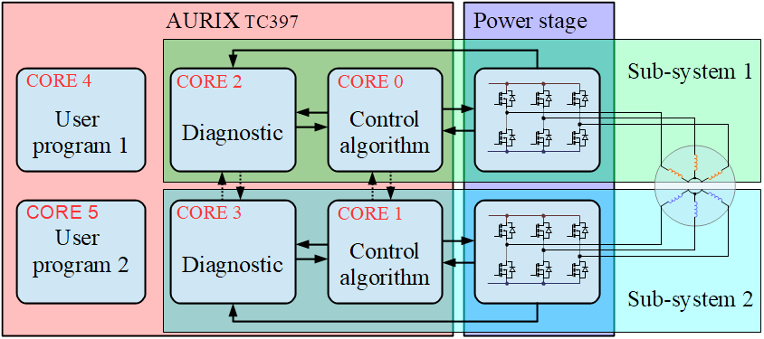
Figure 1: Utilization of separate cores for the control of three-phase subsystems
The algorithms can react to one of the following errors:
• Disconnected phase
• Inter-turn short circuit
• Short circuit between phases
• Short circuited power transistor
• Disconnected power transistor
• Faut in redundant phase current sensor, DC bus voltage sensor, and position sensor.
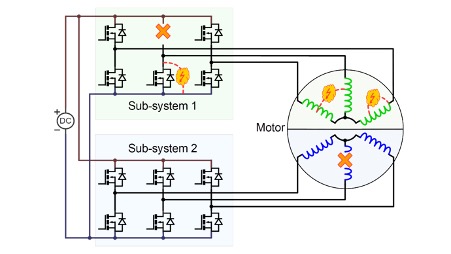
Figure 2: Motor and inverter faults for which it is possible to continue in operation
Algorithms are used to control the drive with redundancies, leading to a significant increase in reliability. As such, the concept does not bring economic benefits for the drives currently in use. Its use will be advantageous for incoming semi-autonomous and autonomous vehicles, which will place high demands on the reliability of critical components. However, this is a significantly cheaper solution than using two separate drives.