



Motor control software for fully electric glider
Fully electric glider motor control software has been developed using a model-based design methodology that facilitates the overall process of certifying control software. The software allows the use of four operating modes of the PMSM drive (IDLE, BREAK, FULL, AUTO), which are switched by binary signals from the mode switch, as selected from a safety point of view.
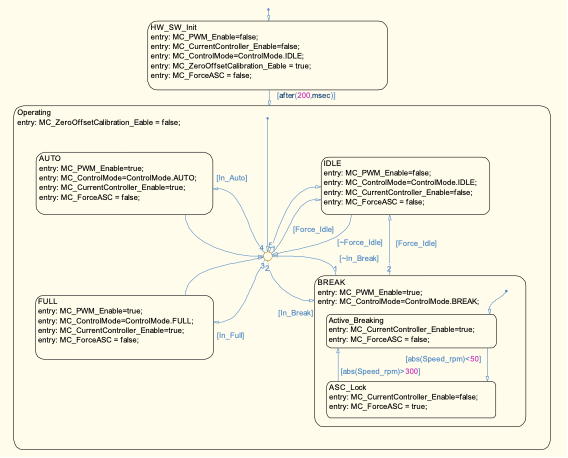
Figure 1: Switching operating mode in StateFlow
SThe SW is ready for integration of the AUTO control mode via the CAN communication bus. All of these modes use torque control of the motor. According to safety requirements, the use of a rotor position sensor with three Hall position sensors is assumed, which has high reliability. The PMSM control algorithm in the form of Simulink models was designed, implemented, and tested in the MATLAB/Simulink environment. The algorithms created in this environment were first verified on a motor model. Subsequently, a C code of motor control was generated from the models, which was integrated together with tailor-made controllers into the microcontroller. The entire SW was tested on a TI Hercules TMS570 microcontroller designed for highly reliable applications.
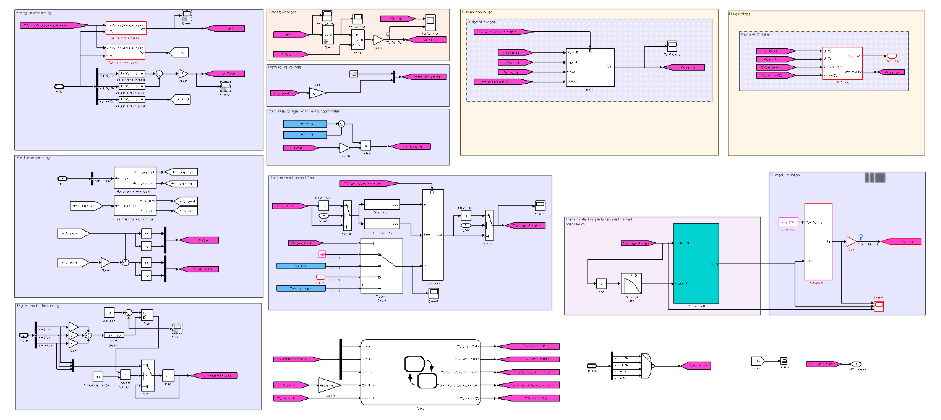 Figure 2: Control algorithm in the environment of MATLAB Simulink
Figure 2: Control algorithm in the environment of MATLAB Simulink
Technical parameters:
- Torque control of PMSM motor with Hall position sensor in four operating modes.
- The motor control SW is implemented and tested in Simulink.
- Drivers of input and output peripherals of the TI Hercules TMS570 microcontroller created with regard to the efficient operation of the entire control SW drive.