



Software pro řízení motoru plně elektrického kluzáku
Software pro řízení motoru plně elektrického kluzáku byl vyvinut metodikou model-based design, která usnadňuje celkový proces certifikace řídicího software. Software umožňuje použít čtyři pracovní režimy PMSM pohonu (IDLE, BREAK, FULL, AUTO), které jsou přepínány pomocí binárních signálů z přepínače režimů, jak bylo zvoleno z bezpečnostního hlediska.
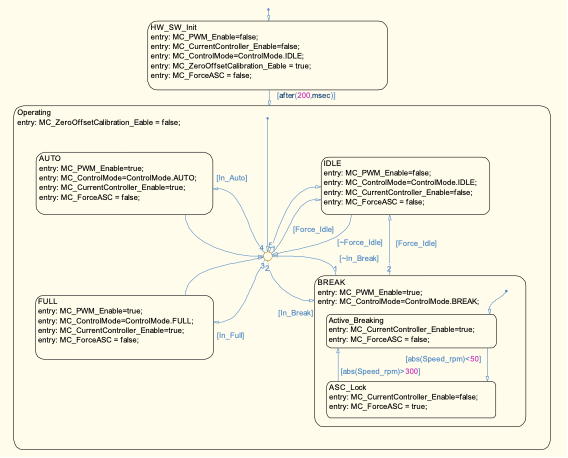
Obrázek 1: Možnost přepínání pracovních režimů ve StateFlow
SW je připraven pro začlenění ovládání požadovaných hodnot režimu AUTO pomocí komunikační sběrnice CAN. Všechny tyto režimy využívají momentové řízení motoru. Dle bezpečnostních požadavků je předpokládáno použití senzoru polohy rotoru se třemi Hall snímači polohy, který má vysokou spolehlivost. V prostředí MATLAB/Simulink byl navržen, implementován a otestován řídicí algoritmus PMSM ve formě Simulink modelů. Takto vytvořené algoritmy byly nejprve ověřeny na modelu motoru. Následně byl z modelů vygenerován C kód regulace motoru, který byl integrován spolu s na míru vytvořenými ovladači do mikrokontroléru. Celý SW byl otestován na mikrokontroléru TI Hercules TMS570 určeném pro vysoce spolehlivé aplikace.
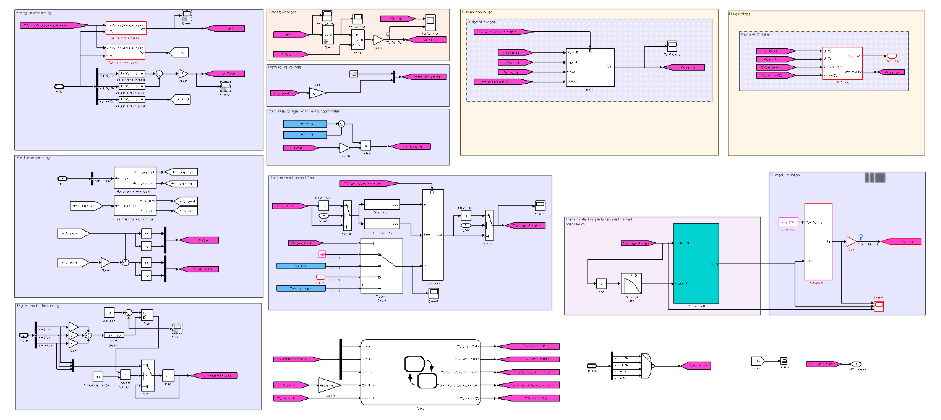
Obrázek 2: Realizace algoritmu řízení v prostředí MATLAB Simulink
Technické parametry:
- Momentové řízení PMSM motoru s Hall sensorem polohy ve čtyřech pracovních režimech.
- Řídicí SW motoru je implementovaný a otestovaný v Simulink, taky aby bylo možné software celé řídící jednotky pohonu certifikovat.
- Ovladače vstupně výstupních periferií mikrokontroléru TI Hercules TMS570 vytvořené s ohledem na efektivní běh celého řídicího SW pohonu.