



Algoritmy řízení elektrických pohonů v poruše
Tento softwarový balík obsahuje řídicí algoritmy pro PMS motory rozšířené o algoritmy kompenzující vliv chyb pohonu, tedy motoru, řídicí jednotky, software, snímačů a výkonových prvků.
Připravený software je určený pro vícefázové elektrické motory. Především pro šestifázový motor zapojený jako dvakrát trojfázový motor. Algoritmy mohou být taktéž jednoduše modifikovány například pro nasazení na třikrát trojfázový motor. Řídicí algoritmy zabezpečují chod motoru v případě elektrické poruchy na statorovém vinutí, v případě poruchy snímače z důvodu redundancí a taktéž při případné poruše výkonového stupně frekvenčního měniče. Mezi vlastnosti algoritmů patří beznárazové přepínání mezi jednotlivými kompenzačními strategiemi řízení motoru tak, aby byl zabezpečen hladký chod motoru. V případě mezizávitového zkratu potlačují kompenzační algoritmy zkratové proudy tím, že poškozená část motoru pracuje v režimu odbuzování. Z toho důvodu je vytvořený SW balík vhodný pouze pro motory, jejichž odbuzovací index je menší než jedna. Snahou implementovaných kompenzačních algoritmů je taktéž minimalizovat vliv poruchy na maximální dosažitelný výstupní výkon motoru. Vstupem do řídicího algoritmu je informace o detekované poruše, která může být buďto přímo detekována výkonovým stupněm měniče (desaturation fault flag) anebo poskytnuta algoritmy pro detekci poruch.
Software je vytvořený jako sada schémat ve vývojovém prostředí MATLAB/Simulink. Přepínání mezi stavy a inicializaci celého systému zabezpečují stavové automaty připravené za pomoci modulu Stateflow.
Ze zdrojových řídicích blokových schémat je možné generovat C/C++ kód vhodný pro implementaci do mikrokontroléru AURIX 2G.
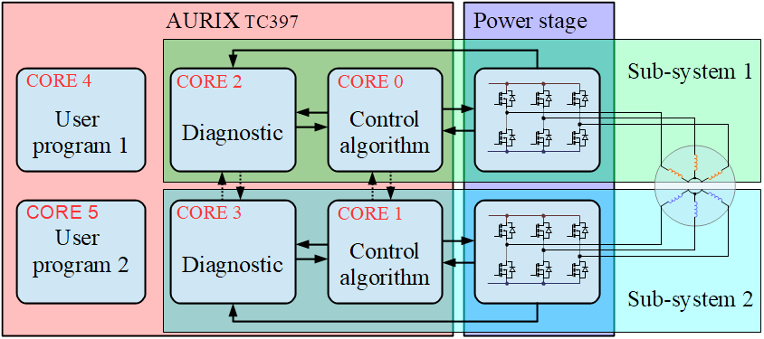
Obrázek 1: Navrhované rozložení SW modulů do jader procesoru.
Řídicí algoritmy pro vícefázový motor zapojený jako dvakrát trojfázový motor s odbuzovacím indexem menším než jedna. Software je vytvořen v prostředí MATLAB/Simulink.
Algoritmy dokáží vhodně reagovat při výskytu jedné z následujících chyb:
• Rozpojená fáze
• Mezizávitový zkrat
• Mezifázový zkrat
• Zkratovaný tranzistor výkonového stupně
• Rozpojený tranzistor výkonového stupně
• Chyba redundantního snímače fázového proudu, napětí ss meziobvodu a úhlového natočení
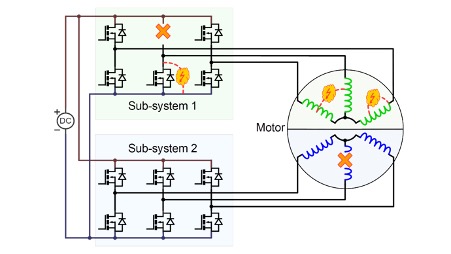
Obrázek 2: Chyby motoru při kterých je možné pokračovat v jeho běhu
Algoritmy slouží k řízení pohonu s redundancemi, vedoucí k výraznému zvýšení spolehlivosti. Koncept jako takový nepřináší ekonomické výhody pro zatím běžně používané pohony. Jeho použití bude výhodné u přicházejících semi autonomních a autonomních vozidel, které budou klást vysoké požadavky na spolehlivost kritických komponent. Jedná se však o výrazně levnější řešení než použití dvou oddělených pohonů.